课上老师介绍了6种参数更新算法
梯度下降(gradient descent, GD)
# Vanilla update
x += - learning_rate * dx
梯度的方向是从小往大的,也就是从低处指向高处,我们想minimize loss,就是需要从高处往低处走,也就是向梯度的反方向走,所以加上负的梯度。
注意:梯度下降算法一般有三种:(a) Batch gradient descent, (b)Stochastic gradient descent, (c)Mini-batch gradient descent; 第一种是每次将训练集所有的example带入来更新梯度,第二种是每次只取训练集中的一个来更新梯度,第三种是每次取训练集的一部分来更新梯度。目前DNN中训练多采用第三种方法来训练,一般说SGD默认也指的是第三种。
缺点:
容易震荡,如图1所示,当横向梯度和纵向梯度不一样的时候,由于各个方向梯度更新的学习率是一致的,这就会导致,横向梯度更新的慢,下降的慢,但是纵向梯度更新的快,造成震荡。
图1: SGD without momentum不好设学习率,从图一可以看出,当学习率设大的时候,纵向梯度由于较大,就容易跑飞,如果设的较小,由于横向梯度小,要收敛很多次,才能到达极值点。
saddle points的存在,DNN中存在许多saddle points,saddle points的梯度为0,但并不是极值点,所以针对这个缺陷,引入了momentum的方法。
momentum
物理意义上解释就是模拟物体运动的惯性。在SGD中,梯度直接影响位置x,现在是梯度先改变速度v,v来改变位置x。
# Momentum update
v = mu * v - learning_rate * dx # integrate velocity
x += v # integrate position
也可以理解为,每次更新的时候,还会考虑上一次的更新v,mu是一个小于1的系数,一般设为[0.5,0.9,0.95,0.99]中的一个,一般开始设为0.5,随着epoch的增加,提升到0.99。v一般初始化为0.
由于momentum每次更新还会考虑上一次的更新,所以在saddle point的时候,即使梯度为0,但是由于上一次的更新还在,可以帮助我们越过这个saddle point,这就类似与小球从高处滚下来,不会在saddle point处停留。
其次从数学角度考虑,当上一次更新v*mu和这一次的梯度更新- learning_rate * dx一致时,那么更新会增加,就会往前多跑一点, 这样会加快收敛;当二者方向不一致,那么会少跑一些,这样会减少震荡。
Nesterov Accelerated Gradient (NAG)
如图2所示:
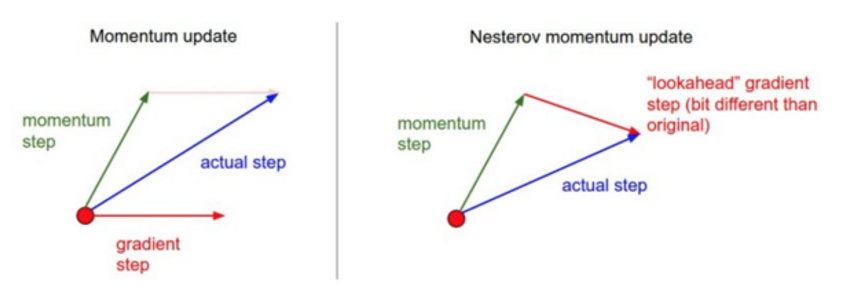
Momentum 算法是考虑上一次的更新和这次的梯度更新,在原点算momentum step 和 gradient step,然后使用向量的累加方式,得到真实的actual step,NAG的想法就是我们肯定是要走momentum step,即x+mu*v,那就走完momentum step,到达新的点后,在新的点求梯度。也就是计算x+mu*v的梯度,而不像是Momentum计算的是x位置的梯度。 更简单的理解就是,momentum是先计算当前点x的梯度,在去加mu*v,而NAG是先做x+mu*v,然后计算x+mu*v的梯度来做修正,二者刚好相反。hinton ppt上的图解可以表达这种意思:
x_ahead = x + mu * v
# 计算dx_ahead(在x_ahead处的梯度,而不是在x处的梯度)
v = mu * v - learning_rate * dx_ahead
x += v
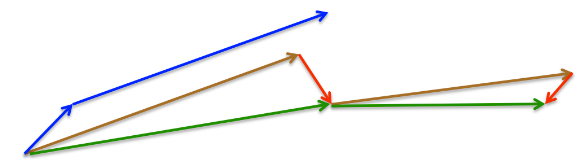
如图3所示:
上面的那段代码,在实践中被人们改写成另外一种方式,通常人们也更喜欢这种方式
v_prev = v # 存储备份
v = mu * v - learning_rate * dx # 速度更新保持不变
x += -mu * v_prev + (1 + mu) * v # 位置更新变了形式
其实这个改写是有公式依据的,第一段代码很容易理解,就是计算x+mu*v的梯度。可以这么说,第一段代码是原始形式的表达,第二段代码是改写形式的表达,公式的推导可以参见知乎专栏 比Momentum更快:揭开Nesterov Accelerated Gradient的真面目.该专栏里给出了第二段代码的数学形式:
公式(1)中可以看出,之所以NAG比momentum快,是因为比momentum多了一项,本次梯度想对于上次梯度的变换量,这个变换量的本质就是对目标函数二阶导的近似,因为利用了二阶导信息,所以NAG比momentum有更快的收敛速度。
小结一下,NAG在Momentum的基础上做了点小的改进,比momentum更快。
之前介绍的方法,有一个共同特性,也可以说是缺陷,就是学习率的操作是全局的,对所有参数作用一致,下面介绍一些适应性学习率调参,可以针对不同参数来自适应不同学习率。
Adagrad
# 假设有梯度和参数向量x
cache += dx**2
x += - learning_rate * dx / (np.sqrt(cache) + eps)
cache的维度和dx一致,通过该方法归一化,梯度大的,在除以cache后,会变小,梯度小的,在处以cache后会变大,eps是防止除数为0,一般可以设为1e-5,1e-6,1e-7。平方根操作非常重要,如果去掉,效果会大降。
缺点:在深度学习中单调的学习率被证明通常过于激进且过早停止学习。
RMSprop
cache = decay_rate * cache + (1 - decay_rate) * dx**2
x += - learning_rate * dx / (np.sqrt(cache) + eps)
来源于Hinton 在coursera课程的第六课第29页ppt。通过修改Adagrad方法,通过对梯度平方滑动平均,RMSprop对Adagrad的修改有点类似与momentum对SGD的修改。
decay_rate是一个超参数,常用的值是[0.9,0.99,0.999]。
Adam
m = beta1*m + (1-beta1)*dx #momentum
v = beta2*v + (1-beta2)*(dx**2) #RMSprop
x += - learning_rate * m / (np.sqrt(v) + eps)
Adam有点像是momentum和RMSprop的结合,使用平滑的梯度m而不是原来的dx。论文里推荐的参数设置为eps=1e-8, beta1=0.9, beta2=0.999.m和v的初始值设为0.
此外,完整的Adam算法还有一个bias 矫正,代码如下:
m, v = # initialization
for t in xrange(0, big_number):
dx = # 梯度
m = beta1*m + (1-beta1)*dx #momentum
v = beta2*v + (1-beta2)*(dx**2) #RMSprop
m /= 1 - beta1**t
v /= 1 - beta2**t
x += - learning_rate * m / (np.sqrt(v) + eps)
小结
learning rate 针对全局的更新算法: SGD --> Momentum --> NAG
learning rate 针对不同参数有所调整的算法:Adagrad --> RMSprop --> Adam
层次关系是依次改进,效果逐渐递增。
推荐使用Adam,或者NAG。
补充
learning rate decay
在训练深度神经网络时,学习率不是一成不变的,会随着epoch的增加,学习率逐渐降低。笔记里给出的理解方式是:学习率开始设置的大,开始系统动能也大,这时候没问题,可以快速收敛,但是收敛到一定程度后,如果学习率依然很大,那么系统动能过大,就有可能越过极值点,导致震荡无法收敛。 所以一般的learning rate decay的方法有以下三种:
step decay: 每隔多少周期,学习率设为原来的0.1或者多少。经验做法:使用固定学习率来训练,观察验证集错误率,每当错误率停止下降,学习率就乘以一个常数(比如0.5)来降低学习率。
Exponential decay: ,其中是超参数,t是迭代次数(也可以是迭代周期数目)
1/t decay:,其中是超参数,t是迭代次数
二阶方法
二阶方法最常用的是牛顿法 需要使用Hessian矩阵,但是不适用于深度神经网络,因为一个深度神经网络参数动辄百万,然后对这个百万的Hessian矩阵求逆,目前的计算机基本不可能。但是优点是没有超参数,如learning rate,可以直接求解,对于一些凸优化问题来说。